PLC實驗室
實驗室設備明細


實驗室設備
萬用控制實驗器、線上模擬器、個人電腦等、機械手臂。
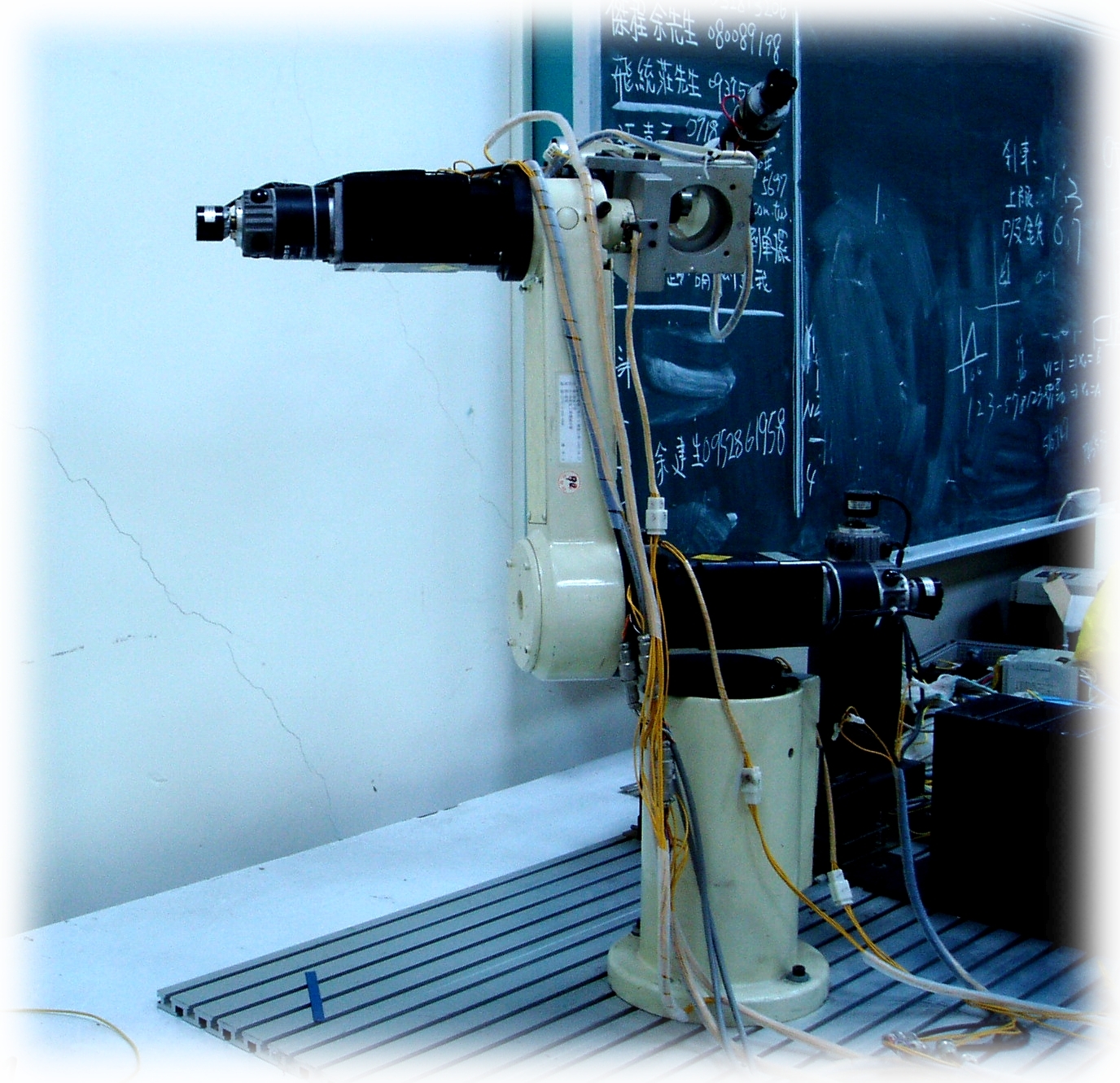
| 名稱 | 機械手臂 |
|---|---|
| 規格 | 本機械手臂,具有五個軸承,功能為夾取物料。以可程式控制器 (PLC) 來控制這些軸承的動作順序,讓機械手臂達到我們預期的動作。機械手臂的各個軸承,是利用氣壓來推動,以使手臂動作。並使用 PLC 來控制氣壓缸的電磁閥。 此機械手臂具有五軸,分別處理十種動作: • 平行夾取物/放物 • 平行夾順轉/逆轉 • 手臂前進/後退 • 手臂上升/下降 • 手臂左旋轉/右旋轉 每一個軸承都具有兩個感測器,因此 PLC 隨時可接收到機械手臂目前的狀況。之後可由電磁閥控制手臂的下一個動作。電磁閥是利用磁鐵相吸相斥的動作原理所做成的,只須其兩端的輸入信號不同(0,1或1,0),就可以控制氣閥,以推動軸承。我們利用 PLC 程式控制電磁閥運作,帶動這些二通道的氣壓缸,以推動軸承動作。 |